UW Robosoccer
Overview
Beginning in Sept 2024, I started a small team alongside 7 other students to build small humanoid robots to play 4v4 soccer. The goal of this project is to develop a team of 4 autonomous humanoid robots to play soccer in the 2026 international Humanoid Robocup competition (child size league) in South Korea.
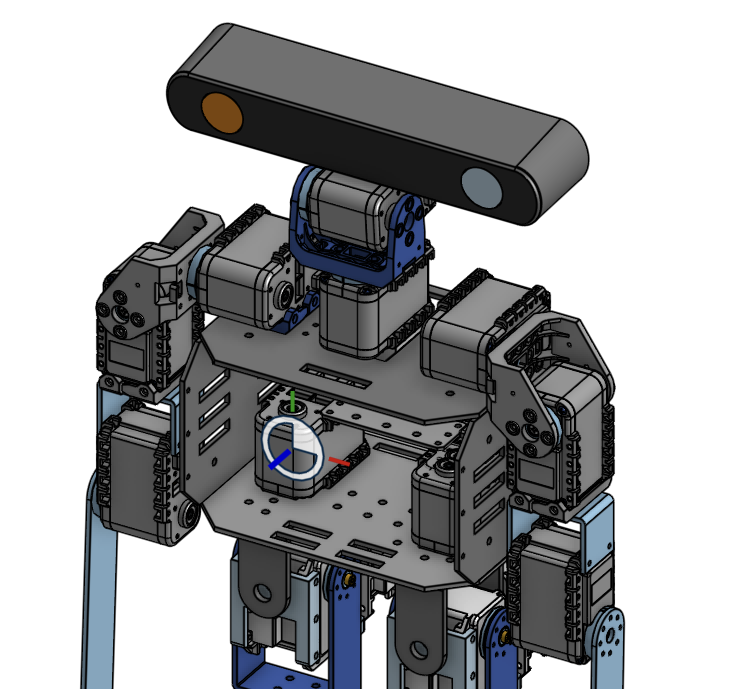
- Robots are roughly 50cm tall, equipped with 2 cameras, 18 servos, and a Raspberry Pi 5
- Attempting to revolutionize the competition by using a deep reinforcement learning approach to control dynamic movements like walking, kicking, and dribbling
- Using MujoCo for simulation and Brax for parallel training
- Developing classical control algorithms for balance using Task Space Inverse Dynamics Control (TSID)
Progress
Mar 2025
This month we focused on developing a simple CoM control for our robot to maintain balance using TSID. We also started implementing a capture point algorithm to allow the robot to stagger and catch itself from falling.
The CoM control finally works!! The solver outputs full body joint positions to control the CoM to follow a reference trajectory.
Feb 2025
This month we focused on developing a simple CoM control for our robot to maintain balance using TSID.
Implemented CoM, feet, and posture trajectory tasks in TSID to maintain balance.
Added feet contact constraints to prevent the robot from falling through the ground - a problem we quickly encountered without any fixed joints added to the URDF model. The HQPsolver was producing errors after adding the fixed joints to the URDF model, most likely due to some conflicts between the constraints. This problem was temporarily fixed by changing the constraint to a task with a high weight.
Something we noticed from the previous month is that due to the contact constraints the robot is not able to balance once it’s center of mass is outside the support polygon. To allow the robot to overcome this limitation we looked into how we can make the robot stagger in this scenario to catch itself from falling. We eventually found a paper that describes an algorithm called capture point which is used to calculate the point that that the robot’s foot must move to to regain balance. We plan to implement this in the next month. (Capture Point: A Step toward Humanoid Push Recovery)
Jan 2025
This month’s goal is to read up on control theory and implement a simple balance controller for the robot.
Read chapters 2-4 of Introduction to Humanoid Robotics on modelling and control of humanoid robots. Learned about:
- Robot kinematics and dynamics including rotation matrices, coordinate transforms, Rodrigues’ formula, etc.
- Zero moment point (ZMP) and its relation to balance
- Linear inverted pendulum model (LIPM) and its use in walking pattern generation
Setup Task Space Inverse Dynamics Control (TSID) in Python and implemented a simple balance controller for the robot by following a lecture series on TSID by Andrea Del Prete.
Dec 2024
This month’s goal is to train some rudimentary skills like getting up, walking, and balance to get familiar with MuJoCo and Brax.
Set up MuJoco simulation environment by porting over an example humanoid environment from Brax
Started training a simple get up policy using PPO and MoCap data (harder than originally thought)
Trained a running policy for fun in Colab using Brax
Nov 2024
This month’s goal is to wrap up research on the current state of the art in humanoid robot control and reinforcement learning.
Read a total of 10 papers and took notes to share with the team during weekly sync:
- Emergent Tool Use From Multi-Agent Autocurricula
- Human-timescale adaptation in an open-ended task space
- Between mdps and semi-mdps: A framework for temporal abstraction in reinforcement learning
- SkillS: Adaptive Skill Sequencing for Efficient Temporally-Extended Exploration
- Emergent Coordination Through Competition
- Responsive Safety in Reinforcement Learning by PID Lagrangian Methods
- Kickstarting Deep Reinforcement Learning
- Information asymmetry in KL-regularized RL
- Distral: Robust Multitask Reinforcement Learning
- Overlapping layered learning notes
Oct 2024
This month’s goal is to familiarize myself with reinformcement learning and finalize logistics for the team.
Oct 2024
This month’s goal is to familiarize myself with reinformcement learning and finalize logistics for the team.
Finished mini series on reinforcement learning
Finished deepmind x UCL course on reinforcement learning
Sept 2024
We’re officially a design team!! Design team number 42 to be exact. We’re still in the process of recruiting members and setting up logistics.